
 2026.06.12 Update
2026.06.09 Update
2026.06.12 Update
2026.06.09 Update



 2025.10.21 Update
2025.10.21 Update
SPACEのサンプル保存容器への液体窒素の供給は、液体窒素自動供給装置を使用します。
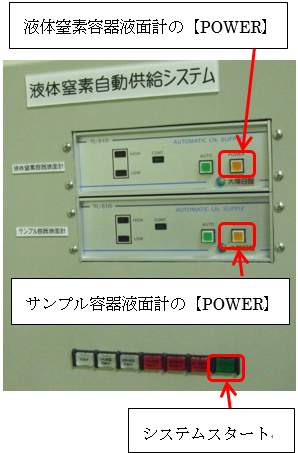
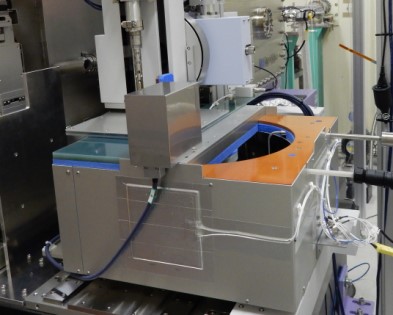
実験ハッチ内に、液体窒素自動供給システムが設置されています。
液体窒素自動供給システムの【システムスタート】と液体窒素容器液面計の【POWER】、サンプル容器液面計の【POWER】がONになっていることを確認してください。
ビームラインでは、ハッチ外から液体窒素自動供給システムをモニターすることができるようになっています。
<自動供給装置エラー>
自動供給装置のエラーランプが点灯及び、警報ブザー音が鳴った際は、担当者までご連絡ください。 → 詳細
<酸素濃度低下によるアラーム>
酸欠警報器が発報した場合は、ハッチ内は立ち入り禁止です。
至急、担当者までご連絡ください。 → 詳細
SPACEピンを使用したい場合は、スタッフにご連絡ください。使用可能なビームラインが限られます。
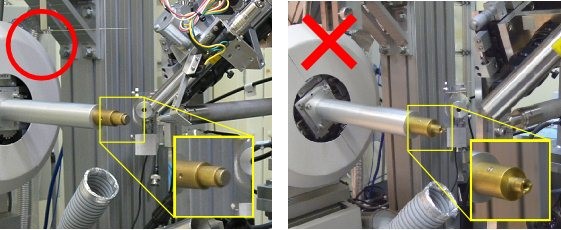
使用可能なビームラインは上図のように、アダプタで切り替えが可能です。
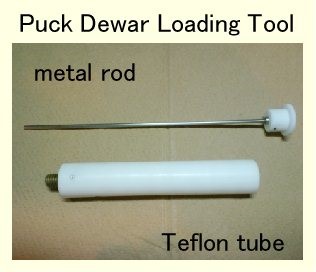
トレイのトレイ蓋とマグネットベースを分離する為の道具です。また、トレイを運搬することも出来ます。

サンプルがすでにセットされたトレイを運搬用の発表スチロール容器あるいは真空断熱容器内に準備してください。。
実験ハッチ内にあるSPACE制御用PCで、制御用ソフト“SPACE GUI“が起動していることを確認してください。 ソフトウェアの起動と初期設定はスタッフが行います。もし起動していなければ、スタッフに連絡してください。
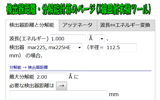
SPACE GUI右上部に、「Mode:BL, Tray Type: UniPuck-16Holes」と表示されていることを確認する。

表示が異なる場合は、”SPACE GUI” 左上部のメニューで「Config → Settings」を選択して下さい。
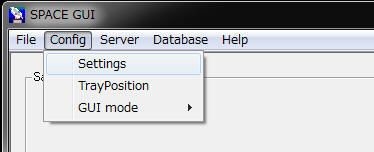
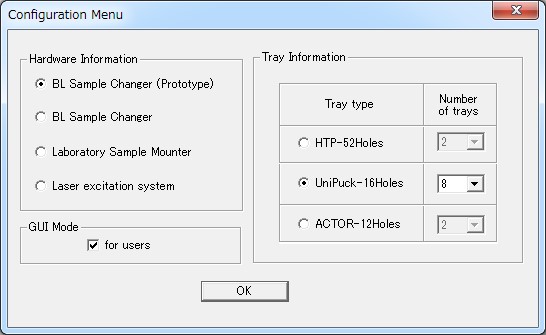
Configuration Menuが表示されます。
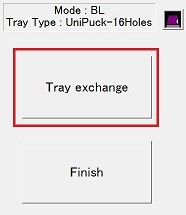
「Tray exchange」ボタンを押してください。
トレイセット位置へ移動します。
ロボットの動きが停止すると画面上にTray IDを入力するダイアログが表示されます。
セット、交換したいトレイ番号を選択し、チェックを入れてください。
選択が終了したら「OK」ボタンを押して、次の作業に進んでください。
※ 選択したトレイ番号の位置に順次回転ステージが回転します。
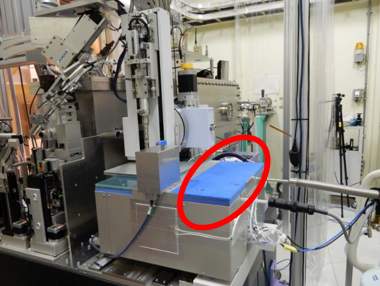
赤丸で囲んでいる蓋を上方へ取り外してください。
Puck Dewar Loading ToolのTeflon tubeをトレイにねじ込んでください。

トレイ蓋の真ん中の穴に、Teflon tubeのねじをねじ込みます。

これでトレイ全体を持ち運ぶことが出来るようになります。しっかり止まっているか確認する為、液体窒素中で軽く持ち上げたりして下さい。
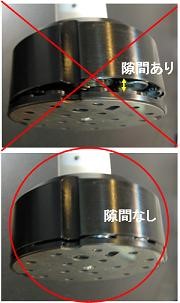
マグネットベースとトレイ蓋に隙間がある場合は、もう一度支柱をしっかりと押し込んで固定してください。
 <注意>
<注意>
マグネットベースとトレイ蓋に隙間があった場合、トレイをサンプル保存容器にセットした時に、サンプルピンがトレイ蓋に残ったり、その周辺のピンが斜めになります。
ピンが斜めになるとSPACEでサンプルピンがつかめず、エラーが出て測定が停止します。
 トレイ設置位置は順次回転しますので、常に赤矢印部からトレイ設置してください。
トレイ設置位置は順次回転しますので、常に赤矢印部からトレイ設置してください。
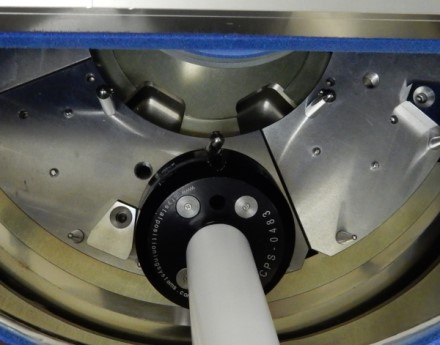 サンプル容器内にはトレイの半円状の凹みを沿わせる為のガイドの支柱がホール側にあります。半円状の凹みをガイドの支柱に沿わせてトレイを下ろしてください。
サンプル容器内にはトレイの半円状の凹みを沿わせる為のガイドの支柱がホール側にあります。半円状の凹みをガイドの支柱に沿わせてトレイを下ろしてください。
トレイはさらに2本の支柱で位置が決められているので、そのまま下ろしていきます。しっかり底に磁力で設置できれば完了です。Teflon Tubeを多少揺すってもトレイは動かなくなります。

Teflon tube内にMetal rodを挿し込みます。

Metal rodがマグネットベースの支柱にしっかり当たったら、Metal rodを押したままTeflon tubeのみを上に引き上げます。

多少堅い場合もありますが、マグネットベース側面の固定用バネが外れてトレイ蓋だけが外れます。
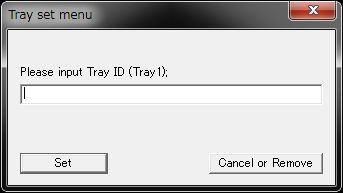 SPACE GUI上には、「Tray set menu」ダイアログが表示されています。任意のTray IDを入力後、「Set」ボタンをクリックしてください。
SPACE GUI上には、「Tray set menu」ダイアログが表示されています。任意のTray IDを入力後、「Set」ボタンをクリックしてください。
 確認ダイアログが表示されます。「OK」ボタンをクリックすると、回転ステージが回転し、次のトレイのセット位置へ移動します。続けて、各トレイを同じ様にセットしてください。
確認ダイアログが表示されます。「OK」ボタンをクリックすると、回転ステージが回転し、次のトレイのセット位置へ移動します。続けて、各トレイを同じ様にセットしてください。
もし、セットするトレイがない場合は、「Cancel or Remove」を押してください。その後のトレイセット作業がキャンセルされます。
 全てのトレイをセット後、確認ダイアログが表示されます。
全てのトレイをセット後、確認ダイアログが表示されます。
「OK」ボタンをクリックすると、待機位置へ移動します。隙間がないように蓋を閉めてください。
 ロボットアームの乾燥動作を行うか、確認ダイアログが表示されます。
ロボットアームの乾燥動作を行うか、確認ダイアログが表示されます。
ロボットアームに、水滴等付着している場合は、「Yes」ボタンを選択してください。ロボットアームの乾燥動作終了後、測定待機位置へ移動します。
ロボットアームの乾燥が必要ない場合は「No」ボタンを選択してください。測定待機位置へ移動します。
全ての作業が終了後、ハッチ内に忘れ物がないかを確認し、実験ハッチから退出してください。
ドライヤー稼働中でも実験ハッチから退出可能です。通常通り退出シーケンスを行って下さい。
クリーニングは数分かかります。クリーニング完了後、待機位置へ移動します。
 まで
まで